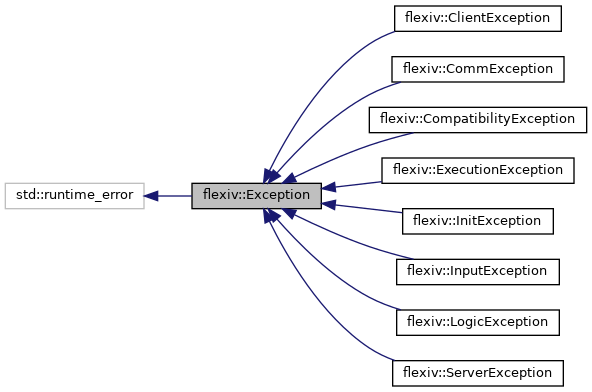
Base class for all custom runtime exception classes.
More...
#include <Exception.hpp>
Base class for all custom runtime exception classes.
- Examples
- basics1_display_robot_states.cpp, basics2_clear_fault.cpp, basics3_primitive_execution.cpp, basics4_plan_execution.cpp, basics5_zero_force_torque_sensors.cpp, basics6_gripper_control.cpp, basics7_auto_recovery.cpp, intermediate1_realtime_joint_position_control.cpp, intermediate2_realtime_joint_torque_control.cpp, intermediate3_realtime_joint_floating.cpp, intermediate4_realtime_cartesian_pure_motion_control.cpp, intermediate5_realtime_cartesian_motion_force_control.cpp, intermediate6_robot_dynamics.cpp, and intermediate7_teach_by_demonstration.cpp.
Definition at line 17 of file Exception.hpp.
The documentation for this class was generated from the following file: